-


 CruiseAOP基础版,测量天空辐亮度、水面辐亮度和天空辐照度,同步记录所测环境照片GPS、横滚、俯仰、航向、太阳方位角和太阳高度角。
CruiseAOP基础版,测量天空辐亮度、水面辐亮度和天空辐照度,同步记录所测环境照片GPS、横滚、俯仰、航向、太阳方位角和太阳高度角。 -



CruiseAOP水体表观光谱智能无人值守观测系统
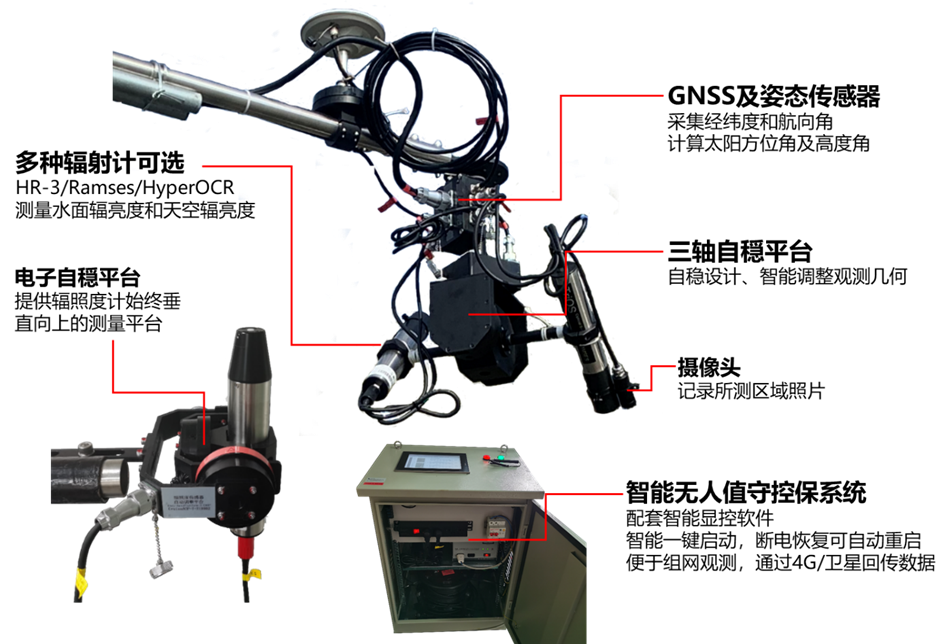
CruiseAOP水体表观光谱智能无人值守观测系统,专用于获取高时空分辨率水色遥感表观光学数据,可进行无人值守船载走航和固定站定点观测。系统测量太阳入射辐照度、水面辐亮度及天空辐亮度,通过本地/云服务器后台配套软件,推导离水辐亮度和遥感反射率,在水色遥感现场辐射定标和数据真实性检验、海洋科学观测、近海海洋环境监测和海洋军事科学方面有着重要的应用价值。
|
为什么要选择CruiseAOP |
传统的海洋光学水体表观光谱测量方法主要包括科考船站位式原位测量、锚系浮标和岸基站单站点长时间序列测量等几种方式,即使是自动化程度较高的系统,也离不开科考人员人为干预,及必要的设备防护措施,不足之处主要为:人员劳动强度大、设备禁不起恶劣天气与海况、低效率、高成本、数据时间空间分辨率不高。
♦ 可无人值守船载走航,又可长时间序列固定站定点观测;
♦ 多种辐射计可选:HR-3、Ramses和HyperOCR高光谱辐射计;
♦ 智能调整辐亮度组合探头观测几何角,辐照度探头采用电子自稳方式保持观测状态,
♦ 丰富的辅助数据:所测环境照片GPS、横滚、俯仰、航向、太阳方位角和太阳高度角;
♦ 便于组网观测:现场数据采集,同时通过无线上传至云服务器;
♦ 专业的设计、生产、布放和维护团队。
CruiseAOP 系统组成原理图
| 型号 | CruiseAOP | CruiseAOP-Pro | |
| 图片 |
|
  |
|
|
观测平台
|
云台 |
三轴智能自稳转台/EPlatform-CAOP-3 |
|
|
二轴智能自稳平台/EPlatform-CAOP-2 |
|||
|
摄像头 |
摄像头/ECam-CAOP |
||
|
连接线缆 |
脐带缆智能缆轴/ESpool-CAOP |
||
|
室外主控终端 |
室外主控终端/ EEndBOX-CAOP |
||
|
电源管理 |
电源管理模块/ EBOX-CAOP-PM |
||
|
GPS |
差分GPS天线/EANT-CAOP |
||
|
系统供电 |
船载供电/太阳能供电系统 |
||
|
数据采集和控保系统 |
智能无人值守控保系统/SmartUCPS-CAOP |
||
|
安装结构 |
选配船载安装杆/ESMR-CAOP或者旋转安装架/ERMF-CAOP |
旋转安装架/ERMF-CAOP |
|
|
水下传感器安装支架 |
|||
|
辐射测量仪器 |
HR-3或TriOS RAMSES(2个亮度1个照度) |
||
|
包装箱 |
EAirBOX-CAE |
||
|
航空箱 |
|||

技术参数
|
型号 |
CruiseAOP |
CruiseAOP-Pro |
|
CruiseAOP参数 |
||
|
直接测量参数 |
天空辐亮度、水面辐亮度和太阳入射辐照度 |
天空辐亮度、水面辐亮度和太阳入射辐照度,2个用户自定义传感器的数据 |
|
可集成辐射计类型 |
HR-3、Ramses和HyperOCR系列高光谱辐射计 |
|
|
推导参数 |
离水辐亮度、遥感反射率 |
|
|
数据传输方式 |
线缆传输 |
无线网络服务器 |
|
输入电压 |
DC24V 或 AC220V |
|
|
工作温度 |
0℃ 至 +50℃ |
-10℃ 至 +50℃ |
|
观测几何调整方式 |
手动/自动/远程控制 |
|
|
积分时间调整方式 |
自动 |
|
|
采样周期 |
>1秒 |
|
|
三轴智能自稳转台/EPlatform-CAOP-3 |
||
|
描述 |
三轴转动,实现高精度角度定位,智能调整辐亮度组合传感器至所需 的观测几何角度, |
|
|
在恶劣海上环境下实现自稳状态,差分GPS高精度定位 |
||
|
方位角可控范围 |
±170° |
|
|
俯仰角自稳范围 |
-40°至 +40° |
|
|
横滚角自稳范围 |
-40°至 +40° |
|
|
角度抖动量 |
0.2° |
|
|
防水等级 |
IP65 |
|
|
观测几何角调整方式 |
手动/自动/远程控制 |
|
|
姿态输出 |
加速度、角速度、角度(包括方位角、俯仰角、横滚角) |
|
|
姿态误差 |
0.5° |
|
|
GPS模块 |
实时获取经纬度,并计算太阳高度角及方位角 |
|
|
重量 |
6.5kg |
|
|
尺寸 |
500mm(L) x 500mm(W)x 420mm(H) |
|
|
二轴智能自稳平台/EPlatform-CAOP-2 |
||
|
描述 |
二轴转动,高精度角度定位,实时自稳,实现辐照度传感器探头始终保持垂直向上状态 |
|
|
俯仰角自稳范围 |
-40°至 +40° |
|
|
横滚角自稳范围 |
-40°至 +40° |
|
|
角度抖动量 |
0.2° |
|
|
防水等级 |
IP65 |
|
|
重量 |
1.6kg |
|
|
尺寸 |
350mm(L) x 200mm(W)x 90mm(H) |
|
|
摄像头/ECam-CAOP |
||
|
描述 |
同步记录所测环境,利用实时拍摄的照片判别耀斑、浪花等干扰, |
|
|
有效辨别异常数据,提高实测数据的准确度 |
||
|
图像像素 |
640 x 480 |
|
|
脐带缆智能缆轴/ESpool-CAOP |
||
|
描述 |
具有便携、小型化、低功耗和智能性的特点;50米缆长,可将船舷上的设备数据通过长距离线缆传输至船舱内部的甲板单元,便于使用人员可在舒适的船舱内部操作及观测系统的运行状态 |
|
|
电缆长度 |
50m |
|
|
尺寸 |
300mm(L) x 250mm(W)x 175mm(H) |
|
|
重量 |
6.4kg |
|
|
室外主控终端盒/EEndBOX-CAOP |
||
|
描述 |
采集辐亮度传感器自动调整平台、辐照度传感器自动调整平台、辐照度、辐亮度、摄像头、GPS等数据 |
具备基础版功能基础上,额外集成2个传感器或以上传感器 |
|
尺寸 |
防水密封箱 |
|
|
450x300x200mm |
||
|
重量 |
2.3 kg |
|
|
输入电压 |
24VDC |
|
|
防水等级 |
IP65 |
|
|
电源管理模块/EBOX-CAOP-PM |
||
|
描述 |
电源管理模块 |
|
|
尺寸 |
200mm(L) x 105mm(W)x 55mm(H) |
|
|
重量 |
0.85kg |
|
|
输入电压 |
12VDC |
|
|
安装结构 |
||
|
型号 |
选配船载安装杆/ESMR-CAOP |
旋转安装架/ERMF-CAOP |
|
水下传感器安装支架(定制) |
||
|
尺寸 |
2010mm(L) x 1800mm(H) |
|
|
伸出船外长度 |
≤1500mm |
|
|
可调角度 |
360°(6个朝向) |
|
|
材质 |
不锈钢304,黑色烤漆 |
|
|
智能无人值守控保系统ECPU-CAOP-S |
||
|
描述 |
专用控制保护系统,具备一键启动和关机功能,系统上电自动运行,无需人为操作;配套可视化软件,实时显示下行辐照度、离水辐亮度、遥感反射率的曲线图及摄像头图片;可选配ThinkPad笔记本电脑。 |
|
|
智能识别工作异常及重启功能,消除长期运行出现的不明错误; |
||
|
超大容量双数据备份,防止数据丢失;智能存储关键参数,预留船载卫星数传功能和接口 |
||
|
尺寸 |
600mm(L) x 470mm(W)x 800mm(H) |
|
|
输入电压 |
105~270V AC(内部集成智能船用稳压器) |
|
|
系统配置 |
四核处理器+8G(超快数据处理) |
|
|
容量 |
主备份容量512G+冗余备份容量128G |
|
|
配套软件 |
数据可视化实时显示/智能识别工作异常和重启 |
|
|
工作异常提醒及记录/关键参数存储,预留卫星远程数传功能 |
||
|
高光谱辐照度计(以HyperOCR为例) |
||
|
型号 |
HyperOCR |
|
|
波长范围(nm) |
305nm-1100nm |
|
|
光谱通道 |
256 |
|
|
光谱取样(nm/pixel) |
3.3nm/pixel |
|
|
光谱精度(nm) |
0.3nm |
|
|
典型辐照度饱和度 |
9Wm-2 nm-1(@500nm) |
|
| 积分时间 | 4-2048ms,自动调整 | |
|
采样频率 |
3Hz(@128ms积分时间) |
|
|
光学入射角 |
余弦 |
|
|
重量 |
1kg |
|
|
输入电压 |
9-18VDC(2W) |
|
|
尺寸(直径*长度) |
60*399mm |
|
|
工作水深(m) |
300 |
|
|
高光谱辐亮度计(以HyperOCR为例) |
||
|
型号 |
HyperOCR |
|
|
波长范围(nm) |
305nm-1100nm |
|
|
光谱通道 |
256 |
|
|
光谱取样(nm/pixel) |
3.3nm/pixel |
|
|
光谱精度(nm) |
0.3 |
|
|
典型辐照度饱和度 |
0.5 Wm-2 nm-1 sr-1 (@500nm) |
|
|
积分时间 |
4 - 2048 ms,自动调整 |
|
|
采样频率 |
3Hz(@128ms积分时间) |
|
|
光学入射角 |
11° |
|
|
重量 |
1kg |
|
|
输入电压 |
9-18VDC(2W) |
|
|
尺寸(直径*长度) |
60*362mm |
|
|
工作水深(m) |
300 |
|





